穿越机构成详解
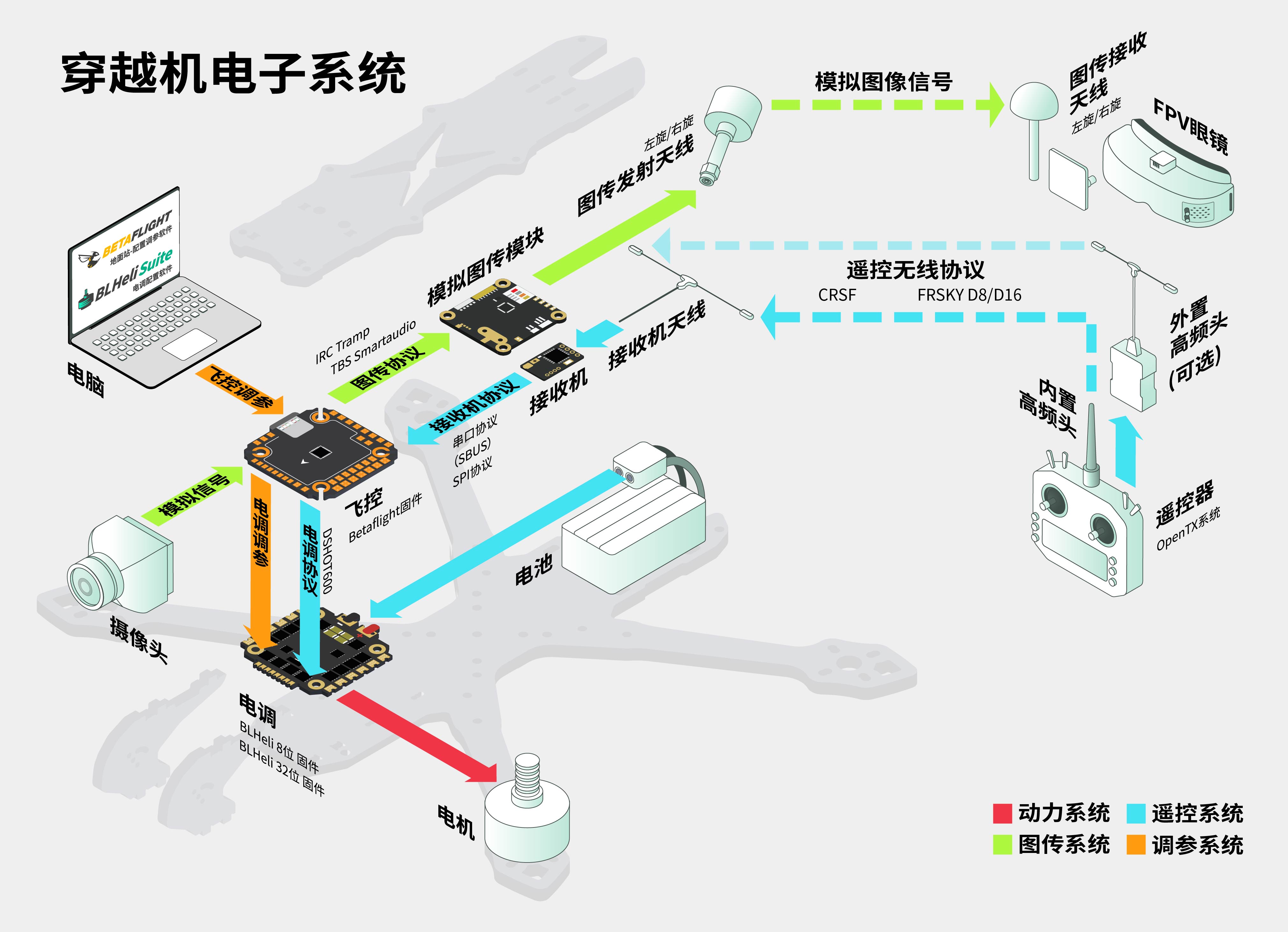
穿越机需要机架,电池,电机,旋翼等动力系统来完成飞行,另外,穿越机的信号控制依赖于遥控系统和FPV图传系统,这两个系统都以飞控作为信号中枢。以上各系统还需要各种固件和协议来完成通信。
飞控(Flight Control)#
飞控简称FC,常与电调等其他模组层叠放置,并称为飞塔(Stack,意为层叠)。
飞控是穿越机的大脑兼小脑,集成了微处理器和多个传感器。飞控一般出厂自带固件,玩家通过配置软件(地面站)就能设置各种参数。目前最主流的穿越机固件配置软件为Betaflight地面站。固件的下载与使用将在之后的刷写飞控固件中介绍。
飞控功能如下:
获取信号
飞控上集成了各种传感器,包括加速度传感器(检测飞行姿态),陀螺仪(检测转动速度)等。另外,飞控也支持连接GPS(获取位置),气压计(检测高度)等多种外置传感器。传感器的原理在入门阶段不用深究。
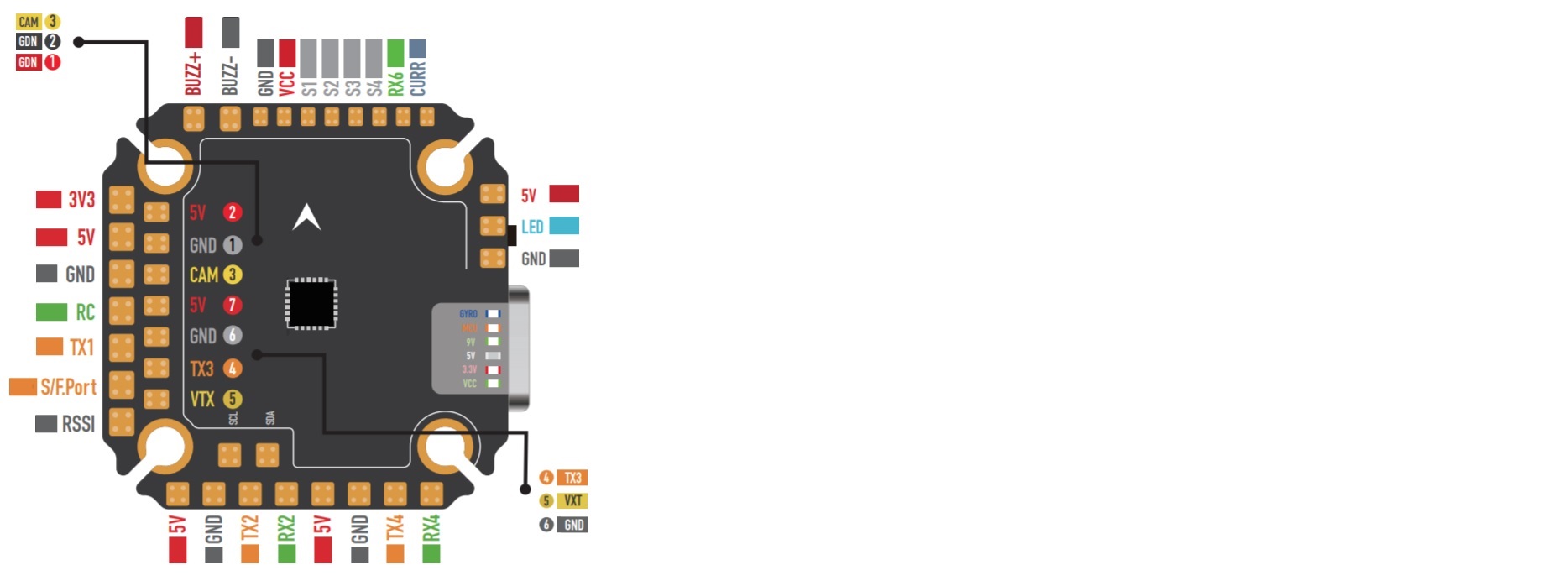
飞控本身不具备无线信号收发功能,但能够通过外置接收机来获取遥控器指令。飞控支持众多不同品牌遥控器和接收机,但是选配时需要留意信号协议和接线。详细的配置说明将在随后的飞控引脚与接线中介绍。
处理并输出信号
飞控能够汇总传感器和遥控接收机的数据,进行计算后控制电机。由于飞控的工作电流较小,控制信号要先经过电调才能驱动电机。
飞控能将视频的模拟信号转码后输出给信号发射端。信号发射端以无线信号的形式发送至地面。
储存飞行数据
飞控中的黑匣子(Black Box)可以用于在飞行结束以后配合录制的视频分析飞行数据,同时还是原炸机现场的重要工具。
黑匣子的使用方法在[文档准备中]一文中有详细介绍,但是入门阶段不用深究。
另外,飞控需要上传固件才能正常工作。固件的各个参数可以在Betaflight地面站中调节。
关于飞控更详细的介绍可以参考飞控参数详解一文。
动力系统(Dynamic System)#
电调(Electronic Speed Control)#
[飞塔与电池的爆炸图, 注明电调位置]
电调简称ESC。电调能解析飞控的信号并驱动电机。飞控与电调间有多种通信协议,在上电调试教程中会作详细介绍。
电调通常也是穿越机的电力总成,电池经过电调降压后才能为飞控供电。
电机与桨叶(Motor and Propeller)#

电机与桨叶是穿越机升力的来源。电机与螺旋桨需要根据穿越机的尺寸选配,例如最常规的5寸穿越机可以搭配1600KV~2700KV的电机。更多关于电机的介绍可以在!电机参数说明和选型指南中阅读。
机架(Frame)#

机架是穿越机的骨骼,优秀的机架需要兼顾重量,强度和外观。常规的3~5寸机一般以碳纤维板作为材料。微型涵道机也会选用树脂塑料作为机架或涵道的材料。另外,柔性的3D打印材料(TPU)以及EVA海绵也广泛地用于制作各种支架和缓冲物。
电池与电容(Battery and Capacitor)#
电池是穿越机动力的来源。穿越机中使用的锂聚合物电池(Lipo Battery)瞬时放电功率可以高达上千瓦,会引起极大的感应电压。为了稳定电压,穿越机的电池通常会并联一个电容,降低电磁干扰。
电池的使用方法会在后续电池冲放与保养一文中作详解。
遥控系统(Remote Control System)#
【遥控系统概览图】
遥控系统负责将遥控器指令发送至飞机,经过信号处理后最终控制电机的转速。更多关于遥控系统的知识会在配置遥控系统中作详解。
遥控系统包括以下组件:
遥控器 - 地面#

与飞控类似,穿越机的遥控器也是一台微型电脑,支持自定义各种功能甚至完成简单编程。
遥控器出厂自带固件,也支持手动刷写。OpenTX是目前最主流的遥控器固件。
高频信号发射器 - 地面#

遥控器通过信号发射器发射无线信号。主流的遥控器中一般内置信号发射器,兼容多种协议。发射器的无线协议和频率必须与接收机相匹配才能使用。穿越机遥控协议目前有很多种,需要与接收机一起选配。为了增加兼容性,很多遥控器的背面会设有外接发射器插槽。信号发射器的频率常见的有915MHZ,2.4GHZ,5.8GHZ等。频率越低信号质量越高,但是需要的功率也越大。注意遥控器的信号频率不能和图传的频率在一个范围,否则会产生严重干扰。
接收机与天线 - 天空#

接收机用于接收无线信号。接收机的空中无线协议和频率必须与发射器相匹配才能使用。
另外,接收机还需要通过硬件协议来将接收到的信息发送给主控板,详细的配置方法会在后文介绍。
图传系统(FPV System)#
FPV系统能将天空中的图像同步到操控者的第一视角眼镜中。目前FPV系统有数字信号和模拟信号两种技术方案。更多关于遥控系统知识会在配置图传系统中作详解。
摄像头 - 天空#

摄像头能采集实时影像信息,并输出至飞控进行画面叠加(OSD)。叠加的信息可以在地面站中设置,支持电量,飞行时间,飞行姿态等。
图传发射器(VTX)与天线 - 天空#
飞控在摄像头采集的画面上叠加OSD信息后,会将图像信息输出至图传模组。图传模组将图像信号转码,通过天线发送至地面。天线的构造会直接发射影响信号的强弱。
图传分为数字信号和模拟信号两种。数字信号的图传模组集成在摄像头内,支持直连飞控。
图传接收器与天线 - 地面#
图传接收器可以用于接收天空中发射器的图像信号,部分FPV设备中会内置接收器。外置接收器的方向性和灵敏度会更好。天线的构造也会直接接收影响信号强弱。
FPV眼镜/屏幕 - 地面#
【图】
飞手通过FPV眼镜回传的图像控制穿越机,FPV设备和收音机的工作原理类似,设置好接收通道后就能监听到该通道的视频信号。