飞控参数说明
本文将围绕以下典型参数表来解释各参数的意义和选配标准。
| 品名 | 曼巴 F405 MK3 飞控 |
|---|---|
| 飞控尺寸 | 30.5mm x 30.5mm M3螺丝 |
| 处理器(MCU) | STM32F405RGT6 |
| 串口数量(UART Set) | 6 |
| 姿态传感器(IMU) | MPU6000 |
| 黑匣子(Black Box) | 16MB |
| 输入电压(Input Voltage) | 3~6S Lipo(12.6~25.2V) |
| 瞬态电压抑制器(TVS) | 支持30V |
| 输出电压(BEC) | 信号电压 3.3V/0.5A 5V/3A 驱动电压 5V/3A 9V/3A |
| 电调协议 | DShot300/600/1200 |
| OSD | 支持Betaflight |
| LED | 4路 支持Betaflight |
飞控尺寸#
[不同尺寸飞控图]
不同大小的机架需要配合不同尺寸的飞控,主流的尺寸有三种:
常规尺寸:通常是五寸机的标配,也常见于各种三寸以上穿越机中。
Mini尺寸:常见于三寸以下的机架中,很多三寸或五寸的机架通常也会兼容mini尺寸的飞控
AIO尺寸:是All-in-one的缩写,意为飞控电调甚至遥控接收机多合一。常见于体积最小的室内穿越机中。
飞控的螺丝尺寸也有差异,以常见的M3为例,3的含义为螺丝直径为三毫米。飞控常见的安装孔尺寸如下:
| 飞控孔距(mm) | 机架尺寸(寸) | 螺丝尺寸 |
|---|---|---|
| 常规尺寸:30.5mm | 3寸以上 | M2/M3 |
| Mini尺寸:25.5mm | 2寸以上 | M2/M3 |
| AIO尺寸:20mm | 2寸以下/100mm以下 | M1自攻/M2/M3 |
处理器(MCU)#
F4,F7的处理器分别是什么?
微处理器是决定飞控性能的关键,飞控的品名中一般都会直接标注F405,F722等微处理器的型号。处理器的型号可以直接在芯片表面上看到。
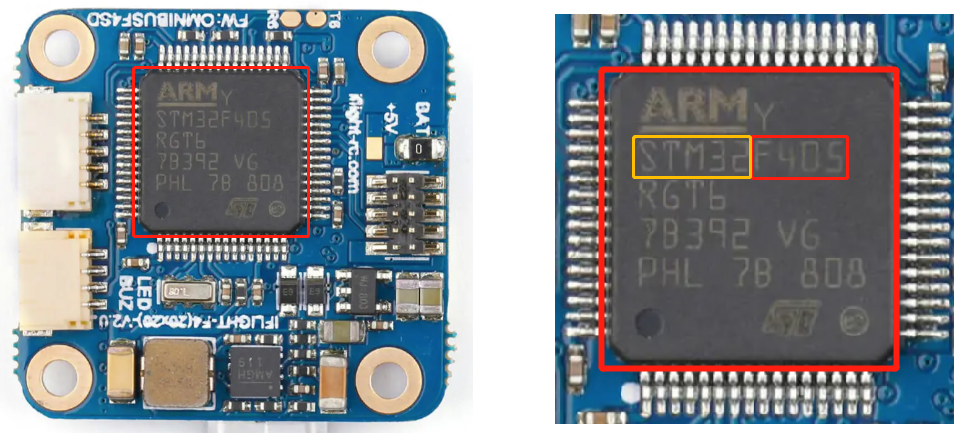
例如上图中的ARM STM32F405的含义分别是:
- ARM:基于ARM架构,是一种常用微型单片机指令集合。
- STM32:由意法半导体(STM)设计的32位芯片。
- F405:芯片的型号为F405,属于F4系列。
ARM架构的STM32系列芯片于2007年发展至今,技术已经非常成熟。而该系列的芯片也在逐年更新迭代,诞生了F1~F7系列。该系列被广泛用在穿越机中,具体参数如下:
| 处理器型号(MCU) | 运算频率(Freq) | 串口数量(UART) | 闪存容量(Flash) | 发布日期 |
|---|---|---|---|---|
| F103 (STM32F103CBT6) | 72MHz | 2 | 128KB | 2007 |
| F303 (STM32F303CCT6) | 72MHz | 3 | 256KB | 2012 |
| F405 (STM32F405RGT6) | 168MHz | 3~5 | 1MB | 2011 |
| F411 (STM32F411) | 100MHz | 2 | 512KB | 2011 |
| F745 (STM32F745VG) | 216MHz | 5~6 | 1MB | 2014 |
| F722 (STM32F722RE) | 216MHz | 5 | 512KB | 2014 |
| F765 (STM32F765) | 216MHz | 5~6 | 2MB | 2014 |
以常见的F405为例,以上参数的含义如下:
运算频率:是决定处理器速度的关键,直接影响到飞行姿态的采样和运算的速度,理论上越快越好,但是168MHz已经基本够用。
串口数量:连接支持UART协议外设的最大数量,支持遥控接收器,GPS模块,闪存卡等各种外置模块。理论上越多越好,但飞控尺寸有限,五个以上基本能满足需求。
闪存容量:决定固件和配置信息允许占用空间的大小,越大越好。随着Betaflight功能的逐步完善,固件占用的空间也越来越大,F3以前的芯片正在逐渐被淘汰。
总的来说处理器发展到F4系列以后就已经不是限制穿越机性能的主要原因了。在购买时通常选择兼容性和性价比较高的处理器即可。比如F745虽然参数上优于F722,但是后者价格便宜,且完全能满足飞行的需要,所以目前F7系列的飞控绝大多是会选择F722。
串口数量#
处理器支持的串口数量不一定和实际能使用的串口数量一致。在一些小型飞控上也会因为尺寸原因仅从芯片中引出部分串口。另外,F7处理器串口具备信号反相器功能,而F4不具备。反相器功能如下:
串口信号反相器(UART Signal Inverter)
接收机常用的SBUS协议需要连接至带有信号反向器的UART串口才能正常工作。F4处理器内不包含信号反相器,SBUS必须要连接到带反相器的RX引脚,所以接收器必须按照产品附带的连线图进行连接。F7处理器中内置了信号反相器,不存在此问题。
姿态传感器(IMU Sensor)#
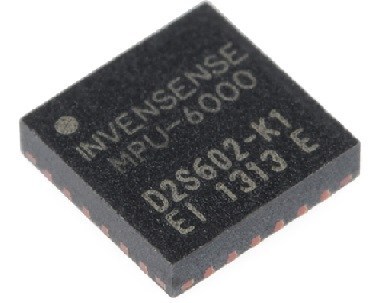
姿态传感器是基于微机电系统(MEMS)的微型传感芯片,常见的姿态传感器型号包括MPU6000,MPU6050等,通过SPI总线连接至处理器,用于检测穿越机的姿态。
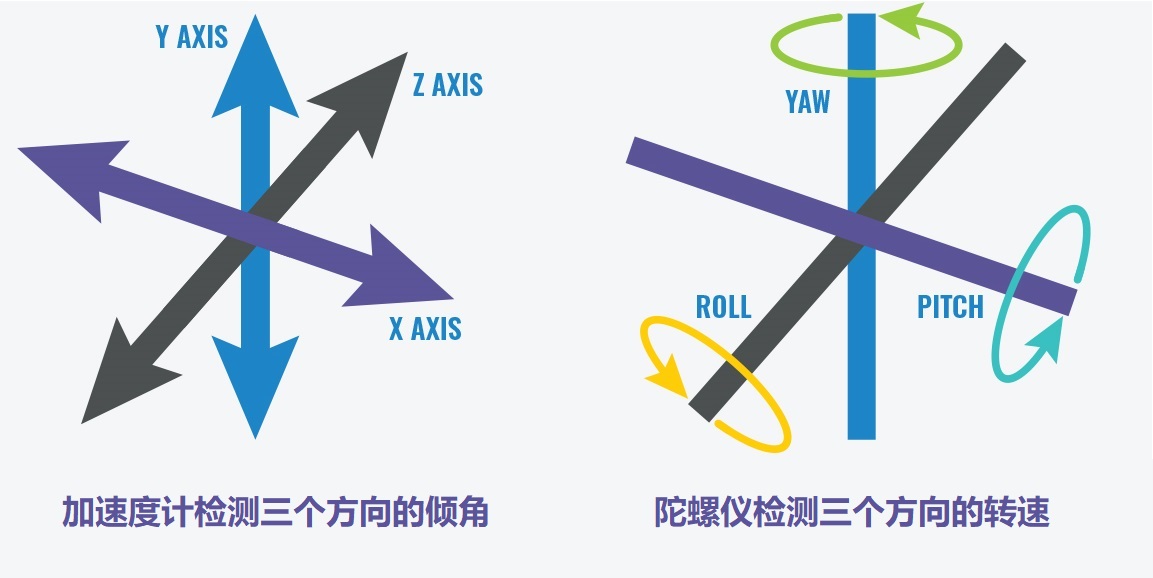
姿态传感器中通常集成了加速度传感器(Accelerometer )和陀螺仪(Gyroscope ),功能分别如下:
加速度传感器(Gyro):检测穿越机在三个方向上的空间倾斜姿态。
陀螺仪(Acc):检测穿越机在三个方向上的旋转速度。
另外也有MPU6050等传感器集成了电子罗盘,能用于感知地理方向,但是穿越机上电磁设备较多,电子罗盘一般需要校正才能使用。
MEMS类传感器需要较强的物理和电子抗噪能力,MPU6000两个抗噪指标都相对优秀,是目前最常用的型号。
物理抗噪:指穿越机在变速运动中仍然能够稳定检测姿态。飞控螺柱上的胶可以有效减少物理噪音。
电子抗噪:指在电路波动中能够准确输出信号。性能较好的飞控通常会使用低压差线性稳压电路(Low Dropout Regulator)来为传感器做供电隔离。
另外,采样率也是传感器的另一个重要指标。理论上采样率越高越好,但是受到电路波动的干扰,过高的采样率往往发挥不出效果。MPU6000的8KHz是一个比较折中的选择。BF中的采样率就是这个含义【图】。
黑匣子闪存(Black Box Flash)#
处理器内的闪存空间有限,仅能用于储存固件和参数,所以飞控上一般会集成一个闪存芯片用于储存飞行数据。目前闪存大小一般在几兆(MB)到几十兆不等,一般能储存数十分钟的飞行数据。
输入电压(Input Voltage)#
输入电压指飞控电源的电压范围。飞控的供电分为电调供电和锂电池供电两种。典型参数表中的3~6S Lipo(12.6~25.2V)代表飞控既可以直插3~6S锂电池,也可以连接12.6~25.2V的电调供电。但是不排除部分飞控不能直接通过锂电池供电,如果电压过高可能会导致飞控烧毁。在选配时需要着重留意电压范围。
输出电压(BEC)#
飞控上板载的降压电路(Battery Eliminate Circuit)能把输入电压降为几档,为各种元件供电。最常规的输出电压分别有3.3V,5V,9V等,用途可分为型号电压和驱动电压。
信号电压:通常为3.3V和5V,用于为穿越机的遥控信号接收机等外设供电。这些元件大多用于收发信号,电流较小。
驱动电压:通常为5V和9V,用于驱动大电流设备,如FPV相机,图传,LED灯等。
在连接设备时需要注意输出电压是否在外接元件的额定范围内,并且外接设备的电流是否小于BEC的最大电流。
电调协议#
DShot(Digital Shot)是目前穿越机最主流的数字电调协议。相较于传统的模拟电调协议,DShot的抗干扰能力更强。DShot后面的数字代表数据传输的频率,如最常见的DShot600代表飞控与电调的通信速率为600,000字节/秒。由于DShot的频率远远超过了绝大多数飞的感知范围,购买留意飞控的协议是否与电调兼容即可。
OSD#
OSD芯片用于在摄像头捕捉到的图像信号上叠加更多信息。早期的飞控软硬件功能不完善,OSD模组需要额外购买,并且手动焊接到飞控上。目前OSD芯片基本已经是飞控的标配。
LED#
穿越机的飞控支持连接WS2812系列三元色(RGB)LED灯带。在Betaflight能够单独为灯带上的每个灯珠设置灯效。另外,我们也能为这些灯效能设置简单的触发条件,如增加油门显示绿色,电量过低显示红色等。
飞控上的LED信号口决定了能够独立控制灯带的数量。每条灯带上都能串联若干个灯珠。在选购飞控时需要留意BED的5V输出电流,单个灯珠需要保证有0.3A以上的电流驱动。